- トップページ
- どんとこいPC情報!!
- P-ROBO(ピーロボ)を作ってみよう!
- P-ROBOとは?
P-ROBO(ピーロボ)を作ってみよう!
P-ROBOとは?
P-ROBOとは何なのか?
まずはP-ROBOについて簡単に紹介します。
P-ROBOは、ワンチップマイコン PIC を搭載したロボットです。単三電池4本で動作します。
このロボットは、センサを使用してコースに引いたラインをトレースしながら走ることのできる、自走ロボットです。
P-ROBO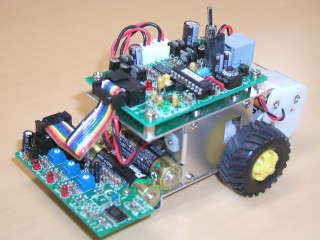
P-ROBO本体裏側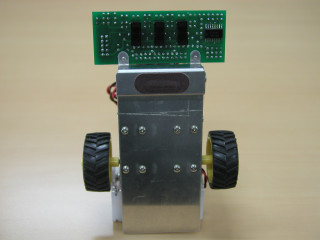
センサ部分拡大
この横に3つ並んだ黒い物がセンサーです。
赤外線LEDとフォトトランジスタが一緒になったセンサーです。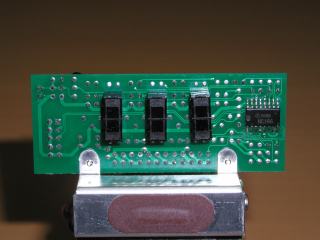
PIC部分拡大
P-ROBOにはCPUとして、ワンチップマイコンPICを使用しています。Ver1.5と書かれたICがPIC(PIC16F84)です。
P-ROBO 構成図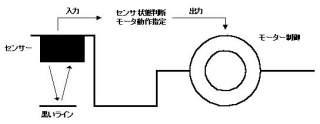
P-ROBOは本体下方に接続した赤外線LEDから赤外線を発光し、黒いラインに反射したフォトトランジスタの信号を受け取ります。センサは、中央、右、左、の3箇所に設置している為、その3個のセンサの状況に合わせて、左右のモーター(タイヤ)を動作させます。
事前準備
必要な物を揃える
まずは必要な物を揃えます。
制御プログラムはアプリケーションプログラムと違って、パソコン上では動きません。動かす物(今回はP-ROBO)が必要になります。その中(P-ROBO)で自分の作ったプログラムが動作するのです。
1.PC(DOS/Vマシン)
これがないと話にならないですね。
しかし、DOS/Vマシンでないと動作しません。
PC98シリーズの方は動作いたしませんのであしからず・・・。
2.P-ROBO本体(1台)
3.CD-ROM「P-ROBO」(1枚)
P-ROBOと一緒についてくるのでご心配なく
4.通信ケーブル(1本)
オプションです。P-ROBOを買うときに一緒に購入しましょう。
5.PIC C コンパイラ
C言語で制御する場合に必要です。アセンブラで制御するには必要ないのですが、本コンテンツはC言語での制御を考えているので必要になります。
・・・ちなみにC言語の知識も必要です。
環境の設定を行う
必要な物がそろったら、それらを使えるように設定を行います。まずはソフトウェアのインストールです。
「P-ROBOV17.EXE」←を実行。
次にPIC C コンパイラをインストールします。これでC言語を使用した制御が可能になります。
「INSTALL.EXE」←を実行。
これでインストールは完了です。エディタは各自で用意してください。
コメント[0] トラックバック[0] 2010年06月02日
コメントの投稿
トラックバックURL
http://www.isl.ne.jp/cgi-bin/mt/mt-tb.cgi/1241